Algoritmos para Grafos | Índice
Este capítulo discute um algoritmo para o problema da CPT sob custos positivos. (Veja uma introdução geral ao problema no capitulo Caminhos de custo mínimo.)
Problema: Dado um vértice s de um grafo com custos positivos nos arcos, encontrar uma árvore de caminhos baratos com raiz s no grafo.
Vale lembrar que uma árvore de caminhos baratos, ou CPT (= cheapest-paths tree), é uma subárvore radicada geradora T de G tal que todo caminho em T que começa na raiz tem custo mínimo em G. Como observamos no capítulo introdutório, uma grafo com custos positivos tem uma CPT com raiz s se e somente se todos os seus vértices estão ao alcance de s. Para escamotear essa condição, podemos trabalhar com o subgrafo induzido pelos vértices que estão ao alcance de s.
Um algoritmo para o problema foi descoberto por Edsger W. Dijkstra [pronuncie algo entre Dêcstra e Dêicstra] e publicado em 1959. O algoritmo é simples, mas sua implementação eficiente apresenta dificuldades inesperadas. A solução dessas dificuldades ensina boas lições de programação.
Sumário:
Dado um grafo G com custos positivos nos arcos e um vértice s, o algoritmo de Dijkstra faz crescer uma subárvore radicada em G, a partir do vértice s, até que ela englobe todos os vértices que estão ao alcance de s. Para simplificar a discussão, vamos supor que todos os vértices de G estão ao alcance de s. Assim, ao final da execução do algoritmo, a subárvore torna-se geradora.
Para discutir os detalhes, usaremos o conceito de franja. A franja (= fringe) de uma subárvore radicada T de G é o conjunto de todos os arcos do grafo que têm ponta inicial em T e ponta final fora de T. Em outras palavras, a franja de T é o leque de saída do conjunto de vértices de T.
Nossa primeira descrição do algoritmo de Dijkstra será feita num nível de abstração bastante alto. O algoritmo é iterativo. Cada iteração começa com uma árvore radicada T, com raiz s, e o vetor dist[ ] das distâncias em T a partir de s. (Portanto, dist[v] é o custo do único caminho de s a v em T se v não pertence a T e dist[v] é infinito em caso contrário.) No começo da primeira iteração, s é o único vértice de T e dist[s] vale 0. O processo iterativo consiste no seguinte: enquanto a franja de T não estiver vazia,
Nessa descrição, cxy é o custo do arco x-y. Depois do passo 1, podemos dizer, informalmente, que y é o vértice fora de T que está mais perto de s.
Exemplo A. Considere o grafo com custos nos arcos definido pela tabela a seguir. Queremos encontrar uma CPT com raiz 0 no grafo.
0-1 0-2 1-3 1-4 2-3 2-4 3-1 3-5 4-5 10 20 70 80 50 60 0 10 10
Veja o rastreamento da execução do algoritmo de Dijkstra.
No início de cada iteração,
registramos o conjunto de vértices da árvore radicada T,
os valores de dist[ ]
(com *
para indicar infinito),
e os arcos da franja de T :
dist[]
T 0 1 2 3 4 5 franja
0 0 * * * * * 0-1 0-2
0 1 0 10 * * * * 0-2 1-3 1-4
0 1 2 0 10 20 * * * 1-3 1-4 2-3 2-4
0 1 2 3 0 10 20 70 * * 1-4 2-4 3-5
0 1 2 3 4 0 10 20 70 80 * 3-5 4-5
0 1 2 3 4 5 0 10 20 70 80 80
O arco da franja que será acrescentado a T na próxima iteração está pintado de vermelho. A CPT calculada pelo algoritmo pode ser resumida apagando as colunas apropriadas na tabela que descreve o grafo:
0-1 0-2 2-3 2-4 3-5 10 20 50 60 10
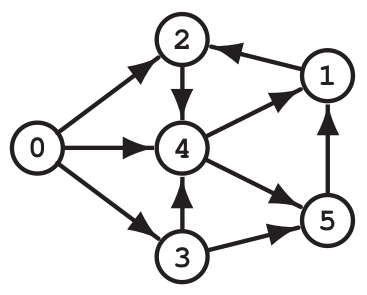
Exemplo B. Queremos encontrar uma CPT com raiz 0 no grafo com custos nos arcos definido a seguir.
0-2 0-3 0-4 2-4 3-4 3-5 4-1 4-5 5-1 1-2 70 50 30 10 10 20 0 30 50 30
Veja o rastreamento da execução do algoritmo de Dijkstra. No início de cada iteração, registramos o conjunto de vértices da árvore radicada T, os valores de dist[ ] e os arcos da franja:
T dist[] franja 0 0 * * * * * 0-2 0-3 0-4 0 4 0 * * * 30 * 0-2 0-3 4-1 4-5 0 4 1 0 30 * * 30 * 0-2 0-3 4-5 1-2 0 4 1 3 0 30 * 50 30 * 0-2 4-5 1-2 3-5 0 4 1 3 5 0 30 * 50 30 60 0-2 1-2 0 4 1 3 5 2 0 30 60 50 30 60
O arco da franja que será acrescentado a T na próxima iteração está pintado de vermelho. A CPT calculada pelo algoritmo pode ser resumida apagando as colunas apropriadas na tabela que descreve o grafo:
0-3 0-4 4-1 4-5 1-2
50 30 0 30 30
0-1 1-2 2-3 3-4 4-5 0-2 0-5 1 1 1 1 1 3 6
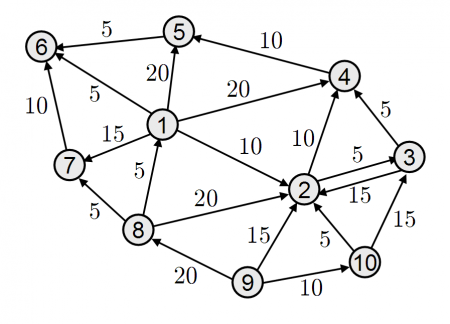
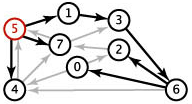
0-1 0-5 1-2 1-3 2-3 2-5 2-6 3-6 5-1 5-4 5-6 6-3 6-4 10 65 10 20 10 40 50 50 10 0 5 20 20
A implementação ingênua
do algoritmo de Dijkstra é ineficiente
porque cada iteração recalcula a franja da árvore radicada,
embora essa franja
seja quase igual à da iteração anterior.
Para obter uma implementação mais eficiente,
é preciso acrescentar à árvore os melhores
arcos da franja,
ainda que eles não sejam definitivos e
possam ser substituídos nas próximas iterações.
Essa ideia leva a uma segunda descrição do algoritmo,
num nível de abstração mais baixo.
Nossa segunda descrição do algoritmo de Dijkstra depende do conceito de vértice maduro. Um vértice do grafo G é considerado maduro (= mature) se o seu leque de saída já foi examinado. Todos os demais vértices de G são considerados imaturos. É claro que todo vértice maduro pertence à árvore em construção.
Cada iteração
do algoritmo começa com
um vetor de pais pa[] que representa
uma árvore radicada T com raiz s,
um potencial dist[] em G,
e um conjunto de vértices maduros.
No começo da primeira iteração,
s é o único vértice de T,
todos os vértices imaturos,
dist[s] vale 0,
e dist[v] vale ∞
para todo v diferente de s.
O processo iterativo consiste no seguinte:
![]() enquanto T tiver vértices imaturos,
enquanto T tiver vértices imaturos,
No passo 2, c é o custo do arco y-z. Convém lembrar que, por definição, um arco y-z está tenso em relação a dist[] se dist[y]+c < dist[z], está relaxado se dist[y]+c ≥ dist[z], e está justo se dist[y]+c ≡ dist[z]. Em particular, todo arco y-z que tem dist[y] < ∞ e dist[z] ≡ ∞ está tenso.
Exemplo C. Voltamos a examinar o exemplo A. Veja novamente a lista de arcos do grafo e seus custos.
0-1 0-2 1-3 1-4 2-3 2-4 3-1 3-5 4-5 10 20 70 80 50 60 0 10 10
Aplique o algoritmo de Dijkstra
a partir do vértice 0.
Veja o conjunto de vértices de T
e o estado dos vetores pa[] e dist[]
no início de sucessivas iterações.
A cor vermelha indica vértices maduros,
-
indica valores indefinidos,
e *
indica ∞:
pa[] dist[]
T 0 1 2 3 4 5 0 1 2 3 4 5
0 0 - - - - - 0 * * * * *
0 1 2 0 0 0 - - - 0 10 20 * * *
0 1 2 3 4 0 0 0 1 1 - 0 10 20 80 90 *
0 1 2 3 4 0 0 0 2 2 - 0 10 20 70 80 *
0 1 2 3 4 5 0 0 0 2 2 3 0 10 20 70 80 80
0 1 2 3 4 5 0 0 0 2 2 3 0 10 20 70 80 80
0 1 2 3 4 5 0 0 0 2 2 3 0 10 20 70 80 80
Observe como os valores em cada coluna de dist[] e de pa[] mudam de uma iteração para a seguinte. A CPT calculada pelo algoritmo tem arcos 0-1 0-2 2-3 2-4 3-5.
Exemplo D. Voltamos a examinar o exemplo B. Veja novamente a lista de arcos e seus custos:
0-2 0-3 0-4 2-4 3-4 3-5 4-1 4-5 5-1 1-2 70 50 30 10 10 20 0 30 50 30
Aplique o algoritmo de Dijkstra a partir da raiz 0. Veja o estado dos vetores pa[] e dist[] no início de sucessivas iterações (com a cor vermelha indicando vértices maduros:
T pa[] dist[]
0 0 - - - - - 0 * * * * *
0 2 3 4 0 - 0 0 0 - 0 * 70 50 30 *
0 2 3 4 1 5 0 4 0 0 0 4 0 30 70 50 30 60
0 2 3 4 1 5 0 4 1 0 0 4 0 30 60 50 30 60
0 2 3 4 1 5 0 4 1 0 0 4 0 30 60 50 30 60
0 2 3 4 1 5 0 4 1 0 0 4 0 30 60 50 30 60
0 2 3 4 1 5 0 4 1 0 0 4 0 30 60 50 30 60
A CPT calculada pelo algoritmo tem arcos 0-3 0-4 4-1 4-5 1-2.
6-1 6-2 1-2 4-3 5-3 0-3 1-4 2-4 0-4 1-5 6-0 1-0 2-0 15 16 25 25 15 15 44 42 11 45 47 30 30
0-1 0-5 1-2 1-3 2-3 2-5 2-6 3-6 5-1 5-4 5-6 6-3 6-4 10 65 10 20 10 40 50 50 10 0 5 20 20
0-1 0-4 1-5 2-0 2-3 2-4 4-3 5-0 5-2 10 30 10 10 60 50 10 40 20
Para provar que o algoritmo de Dijkstra está correto, é preciso verificar que as seguintes propriedades invariantes valem no início de cada iteração:
Verificados os invariantes, considere o início da última iteração. Nesse momento, todos os vértices de T estão maduros. Logo, pelo invariante iii, todo arco de G com ponta inicial em T está relaxado em relação a dist[]. Em particular, para todo arco v-w de G, se v está em T então dist[w] < ∞ e portanto w está em T, conforme o invariante ii. Segue daí que todo vértice ao alcance de s em G pertence a T. Se supusermos, para simplificar a discussão, que todos vértices de G estão ao alcance de s, podemos concluir que T é geradora de G. Resumindo: em virtude do invariante ii, dist[] é o vetor das distância em T a partir de s e, em virtude do invariante iii, dist[] é um potencial relaxado. Segue daí que T é uma CPT de G com raiz s.
Se nem todos os vértices estiverem ao alcance de s, o algoritmo produz uma CPT do subgrafo de G induzido pelos vértices que estão ao alcance de s.
A função GRAPHcptD1() abaixo implementa o algoritmo de Dijkstra que discutimos acima. A função supõe que o grafo G é representado por listas de adjacência com custos e portanto, para cada vértice v e cada a em G->adj[v], o arco que vai de v a a->w tem custo a->c. O conjunto dos vértices maduros é representado por seu vetor característico mature[]. O infinito é representado pela constante INT_MAX. A função supõe, tacitamente, que o valor da expressão dist[v] + a->c é sempre menor que INT_MAX. (Para garantir isso, basta que a soma de todos os custos seja menor que INT_MAX. Essa condição também garantirá que não teremos overflow aritmético.)
/* Esta função recebe um grafo G com custos positivos nos arcos e um vértice s. Calcula e armazena em pa[0..V-1] o vetor de pais de uma CPT de G com raiz s (supondo que todos os vértices de G estão ao alcance de s). As distâncias a partir de s são armazenadas no vetor dist[]. (A função implementa o algoritmo de Dijkstra. O código foi inspirado no Programa 20.3 de Sedgewick.) */
void GRAPHcptD1( Graph G, vertex s, vertex *pa, int *dist) { bool mature[1000]; for (vertex v = 0; v < G->V; ++v) pa[v] = -1, mature[v] = false, dist[v] = INT_MAX; pa[s] = s, dist[s] = 0; while (true) { // escolha de y: int min = INT_MAX; vertex y; for (vertex z = 0; z < G->V; ++z) { if (mature[z]) continue; if (dist[z] < min) min = dist[z], y = z; } if (min == INT_MAX) break; // atualização de dist[] e pa[]: for (link a = G->adj[y]; a != NULL; a = a->next) { if (mature[a->w]) continue; if (dist[y] + a->c < dist[a->w]) { dist[a->w] = dist[y] + a->c; pa[a->w] = y; } } mature[y] = true; } }
A função supõe que todos os vértices do grafo estão ao alcance de s. Mas mesmo que essa condição não esteja satisfeita, o resultado da função é útil, pois a árvore definida por pa[] é uma CPT do sugrafo induzido pelos vértices que estão ao alcance de s.
Desempenho. A função GRAPHcptD1() examina cada arco do grafo uma única vez. Quando aplicada a um grafo com V vértices e A arcos, a função consome tempo proporcional a V2 + A no pior caso. Como A < V2, o consumo de tempo da função é proporcional a
V2
no pior caso. Podemos dizer que a função é linear quando aplicada a grafos densos, uma vez que o tamanho de tais grafos é proporcional a V2.
enxuto, sem variáveis e operações supérfluas.
0-1 0-2 1-2 1-3 1-4 2-3 2-4 3-4 3-5 4-5 4-0 10 40 20 50 60 20 50 10 20 0 0
6-1 6-2 1-2 4-3 5-3 0-3 1-4 2-4 0-4 1-5 6-0 1-0 2-0 15 16 25 25 15 15 44 42 11 45 47 30 30
0-2 0-3 0-4 2-4 3-4 3-5 4-1 4-5 5-1 1-2 70 20 40 10 10 30 40 10 20 0
0-2 0-4 1-3 2-7 3-6 4-5 4-7 5-1 5-4 5-7 6-0 6-2 6-4 7-3 7-5 26 38 29 34 52 35 37 32 36 27 58 40 93 39 28
0 1 2 3 4 5 (1,3) (2,1) (6,5) (3,4) (3,7) (5,3)
Suponha que as arestas do grafo são 1-0 3-5 5-2 3-4 5-1 0-3 0-4 4-2 2-3 e o custo de cada aresta é igual ao comprimento do segmento de reta que liga as pontas da aresta. Submeta o grafo à função GRAPHcptD1() com s = 0. Exiba o estado dos vetores pa[] e dist[] no início de cada iteração.
A primeira implementação do algoritmo de Dijkstra
começa cada iteração examinando os vértices imaturos,
um por um,
à procura de algum que minimize dist[].
Para acelerar esse processo,
a implementação que examinaremos a seguir
mantém os vértices imaturos em uma
fila priorizada de mínimo
(= min priority queue).
(Seria suficiente manter na fila priorizada
os vértices imaturos que pertencem a T,
mas é mais simples colocar na fila
todos os vértices imaturos,
mesmo os que estão fora de T.)
/* Recebe um grafo G com custos positivos nos arcos e um vértice s. Calcula e armazena em pa[] o vetor de pais de uma CPT de G com raiz s (supondo que todos os vértices de G estão ao alcance de s). As distâncias a partir de s são armazenadas no vetor dist[]. (A função implementa o algoritmo de Dijkstra. O código foi inspirado no Programa 21.1 de Sedgewick.) */
void GRAPHcptD2( Graph G, vertex s, vertex *pa, int *dist) { bool mature[1000]; for (vertex v = 0; v < G->V; ++v) pa[v] = -1, mature[v] = false, dist[v] = INT_MAX; pa[s] = s, dist[s] = 0; PQinit( G->V); for (vertex v = 0; v < G->V; ++v) PQinsert( v, dist); while (!PQempty( )) { vertex y = PQdelmin( dist); if (dist[y] == INT_MAX) break; // atualização de dist[] e pa[]: for (link a = G->adj[y]; a != NULL; a = a->next) { if (mature[a->w]) continue; if (dist[y] + a->c < dist[a->w]) { dist[a->w] = dist[y] + a->c; PQdec( a->w, dist); pa[a->w] = y; } } mature[y] = true; } PQfree( ); }
Os vértices imaturos
ficam todos armazenados numa fila priorizada de mínimo
.
As prioridades dos vértices
são dadas por dist[].
A fila é manipulada pelas seguintes funções:
A maneira usual de implementar a fila priorizada usa uma estrutura de heap.
Tal como na primira implementação, se nem todos os vértices estiverem ao alcance de s, o vetor pa[] produzido pela função representará uma CPT do sugrafo de induzido pelos vértices que estão ao alcance de s.
Desempenho. Suponha que nosso grafo tem V vértices e A arcos. Se a fila priorizada for implementada em um heap, todas as operações sobre a fila serão executadas em tempo limitado por log V. Nesse caso, GRAPHcptD2() consumirá tempo proporcional a (V+A) log V no pior caso. Se A ≥ V − 1, como acontece em muitas aplicações, o consumo de tempo será proporcional a
A log V
no pior caso. Podemos dizer que GRAPHcptD2() é linearítmica.
A função GRAPHcptD2() é mais sofisticada que GRAPHcptD1(), pois usa uma fila priorizada. Apesar disso, ela é assintoticamente mais lenta que GRAPHcptD1() quando A é próximo de V2.
Como se compara o consumo de tempo de GRAPHcptD2() com o de GRAPHcptD1()? Se nos restringirmos a grafos esparsos, GRAPHcptD2() é assintoticamente mais rápida que GRAPHcptD1(). Se nos restringirmos a grafos densos, a relação se inverte: GRAPHcptD1() é assintoticamente mais rápida que GRAPHcptD2().
enxuto, sem variáveis e operações supérfluas.
direção inicialN, L, S, ou O. Problema: encontrar um caminho de s a t que começe na direção f e minimize o número de mudanças de direção. (Sugestão: Reduza ao problema do caminho de custo mínimo. Troque cada vértice v por 4 novos vértices: vN, vL, vS, vO, cada um representando uma possível direção de chegada a v. Acrescente arestas apropriadas e atribua custos 0 e 1 às arestas conforme haja mudança de direção ou não.)
A chain is only as strong as its weakest link. [Sedgewick 21.30] Caminho minmax. Suponha dado um grafo com custos positivos nos arcos. O gargalo (antigargalo?) de um caminho é o custo do seu arco mais caro (ou melhor, o custo um arco de custo máximo do caminho). (A chain is only as strong as its weakest link.s a um vértice t.- Escreva uma função que encontre um caminho mínimo num tabuleiro com n linhas e n colunas. Cada casa do tabuleiro tem um custo positivo e o custo de um caminho é a soma dos custos das casas por onde o caminho passa. O seu caminho deve começar na casa que está no cruzamento da linha 1 com a coluna 1 e terminar na casa que está no cruzamento da linha n com a coluna n. O caminho só pode passar de um casa para a casa vizinha na horizontal ou na vertical (não na diagonal).
- [Sedgewick 21.52] Custos nos vértices. Suponha dado um grafo com custos positivos nos vértices (não nos arcos). O custo de um caminho num tal grafo é a soma dos custos dos vértices do caminho. Quero encontrar um caminho mínimo dentre os que começam num vértice s e terminam num vértice t. (Veja exercício Custos nos vértices no capítulo Distâncias e potenciais sob custos positivos.) Modifique o algoritmo de Dijkstra para resolver o problema.
- É possível usar o algoritmo para árvore geradora de custo mínimo (como o de Prim ou o de Kruskal), sem alterações, para encontrar uma árvore geradora de custo máximo num grafo não-dirigido conexo com custos nas arestas? É possível usar um algoritmo para caminhos mínimos (como o de Dijkstra, por exemplo) para encontrar um caminho de custo máximo de um dado vértice s a um dado vértice t?
- Caminhos simples de custo máximo? Digamos que a
antidistânciade um vértice s a um vértice t num grafo com custos poitivos nos arcos é o custo de um caminho simples de custo máximo dentre os que vão de s a t. Denote por ad[] o vetor de antidistâncias a partir de s. Modifique o algoritmo de Dijkstra da seguinte maneira: em cada iteração, escolha um arco x-y na franja de T que maximize a soma ad[x] + cxy . É verdade que essa versão modificada calcula aantidistânciade um vértice s e cada um dos demais vértices do grafo?- Todos os pares. Escreva uma função que receba um grafo com custos positivos nos arcos e preencha uma matriz dist[0..V-1][0..V-1] com as distância entre todos os pares de vértices. (Imagine uma tabela de distância rodoviárias entre as cidades de um país.)