|
(This page in english.)
(Clique aqui para os fontes da implementação de SH e os fontes da dissertação.)
Existem situações práticas onde é necessário determinar se um dado grafo pode ser desenhado no plano de tal forma que suas arestas só se intersectem nos pontos extremos. Um desenho desse tipo é chamado de desenho plano do grafo e um grafo para o qual existe um desenho plano é dito planar (veja figura 1). Por exemplo, em projetos de circuitos VLSI, existe o interesse em obter-se um desenho plano de um grafo que representa um circuito elétrico.
Uma caracterização muito simples de grafos planares foi dada por
Kuratowski [8].
Ele demonstrou que todo grafo que não é planar
contém uma subdivisão do grafo
![]() ou do grafo
ou do grafo
![]() (veja figura 2).
Reciprocamente, nenhum grafo planar contém subdivisões de tais grafos.
Uma subdivisão de
(veja figura 2).
Reciprocamente, nenhum grafo planar contém subdivisões de tais grafos.
Uma subdivisão de
![]() ou
ou
![]() contida num grafo é chamada de subgrafo de Kuratowski.
contida num grafo é chamada de subgrafo de Kuratowski.
Apesar de elegante, a caracterização de Kuratowski não fornece um algoritmo muito prático para teste de planaridade. Ademais, não está claro como obter um desenho plano de um grafo planar através dessa caracterização.
Uma possível estratégia para decidir se um grafo
![]() é planar é construir incrementalmente um desenho plano de
é planar é construir incrementalmente um desenho plano de
![]() .
Se for possível completar a construção de um desenho plano de
.
Se for possível completar a construção de um desenho plano de
![]() ,
então
,
então
![]() é planar, caso contrário, idealmente, um subgrafo de Kuratowski é encontrado em
é planar, caso contrário, idealmente, um subgrafo de Kuratowski é encontrado em
![]() ,
justificando a não planaridade de
,
justificando a não planaridade de
![]() .
O primeiro algoritmo incremental para teste de planaridade foi
proposto por Auslander e Parter [1].
Dado um grafo
.
O primeiro algoritmo incremental para teste de planaridade foi
proposto por Auslander e Parter [1].
Dado um grafo
![]() ,
primeiramente, um circuito de
,
primeiramente, um circuito de
![]() é encontrado.
O grafo resultante da remoção desse circuito de
é encontrado.
O grafo resultante da remoção desse circuito de
![]() é composto de `partes' conexas.
O algoritmo é chamado recursivamente para obter um desenho plano de cada uma
dessas partes junto com o circuito.
Depois, esses desenhos planos são combinados, se possível, para obter um
desenho plano de
é composto de `partes' conexas.
O algoritmo é chamado recursivamente para obter um desenho plano de cada uma
dessas partes junto com o circuito.
Depois, esses desenhos planos são combinados, se possível, para obter um
desenho plano de
![]() .
Se não for possível combinar esses desenhos planos, um subgrafo de Kuratowski é
encontrado em
.
Se não for possível combinar esses desenhos planos, um subgrafo de Kuratowski é
encontrado em
![]() .
O algoritmo de Auslander e Parter continha um erro que
foi corrigido por Goldstein [6],
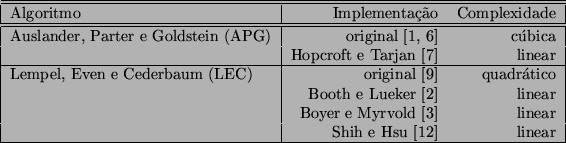
resultando no algoritmo de Auslander, Parter e Goldstein (APG).
A complexidade de tempo desse algoritmo é cúbica.
.
O algoritmo de Auslander e Parter continha um erro que
foi corrigido por Goldstein [6],
resultando no algoritmo de Auslander, Parter e Goldstein (APG).
A complexidade de tempo desse algoritmo é cúbica.
Lempel, Even e Cederbaum [9] (LEC) apresentaram uma maneira alternativa de se construir um desenho plano incrementalmente. Eles começam com o desenho de um único vértice e adicionam ao desenho todas as arestas incidentes a este vértice. Depois adicionam um novo vértice incidente a uma das arestas já inseridas e todas as arestas incidentes a este novo vértice. O processo continua dessa maneira. Cada iteração do algoritmo começa com um desenho plano de parte do grafo e consiste em adicionar um novo vértice e todas as arestas incidentes a este vértice ao desenho plano corrente. O processo continua até que todo o grafo tenha sido desenhado no plano ou tenha-se detectado que o grafo não é planar. Este tipo de algoritmo incremental é chamado de vertex addition algorithm. Tarjan [13] apresentou uma implementação do algoritmo de LEC que consome tempo quadrático.
Em 1974, Hopcroft e Tarjan [7] apresentaram o primeiro algoritmo linear para decidir se um dado grafo é planar. O algoritmo de Hopcroft e Tarjan é uma implementação envolvente do algoritmo de APG.
Hopcroft e Tarjan não deram muitos detalhes de como o seu algoritmo de teste de planaridade pode ser estendido para construir de fato um desenho plano do grafo dado. Uma descrição completa da fase de construção de um desenho plano por esse algoritmo foi feita por Mehlhorn e Mutzel [10] e a respectiva implementação por Mutzel [11]. Até hoje não se conhece uma implementação do algoritmo de Hopcroft e Tarjan que, em tempo linear, devolve um certificado de não planaridade, ou seja, um subgrafo de Kuratowski de um grafo não-planar.
Em 1976, Booth e Lueker [2] apresentaram uma implementação do algoritmo de LEC que consome tempo linear. Para isto, Booth e Lueker empregaram uma estrutura de dados chamada de PQ-árvore. Recentemente, Shih e Hsu [12] e Boyer e Myrvold [3] descreveram implementações similares para o algoritmo de LEC. Ambas gastam tempo linear e evitam o uso de PQ-árvores.
Os dois algoritmos lineares para teste de planaridade mais discutidos na literatura são os algoritmos de APG e o de LEC. Canfield e Williamson [4] fazem uma comparação entre esses dois algoritmos argumentando que os dois, geralmente vistos como métodos bem diferentes, têm na realidade muitas semelhanças.
A figura 3 mostra um resumo do consumo de tempo de algumas implementações dos principais algoritmos de planaridade existentes até hoje.