Algoritmos para Grafos | Índice
Qual o caminho mais curto, em número de quarteirões, de um ponto A a um ponto B de uma grande cidade?
Este capítulo é uma introdução geral ao problema do caminho de comprimento mínimo em grafos. Embora corriqueiro, o problema tem sutilezas que precisam ser bem entendidas antes que possamos tentar resolvê-lo. Um bom algoritmo para o problema do caminho mínimo será discutido num próximo capítulo. O presente capítulo tratará apenas de condições necessárias e suficientes de minimalidade bem como de um algoritmo especial para grafos acíclicos.
Sumário:
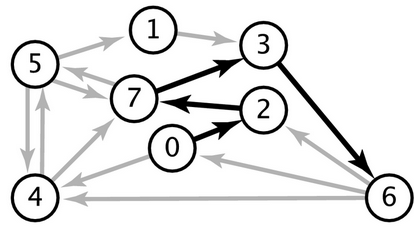
Um caminho C num grafo é
mínimo se não existe outro caminho que
![]() tenha a mesma origem e o mesmo término que C
mas comprimento menor que o de C.
(Vale lembrar que o comprimento é o número de arcos do caminho.)
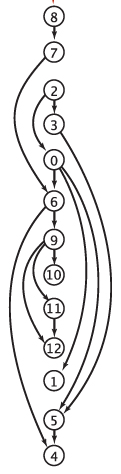
Na figura acima, por exemplo,
o caminho 0-2-7-5-1-3-6 não é mínimo
porque o caminho 0-2-7-3-6
é mais curto.
tenha a mesma origem e o mesmo término que C
mas comprimento menor que o de C.
(Vale lembrar que o comprimento é o número de arcos do caminho.)
Na figura acima, por exemplo,
o caminho 0-2-7-5-1-3-6 não é mínimo
porque o caminho 0-2-7-3-6
é mais curto.
Problema do caminho mínimo: Dados vértices s e t de um grafo G, encontrar um caminho mínimo em G que tenha origem s e término t.
É claro que todo caminho mínimo é simples.
(Portanto, o simples
na expressão
caminho simples mínimo
é redundante.)
É claro também que nem toda instância do problema tem solução:
se t não está ao alcance de s
então não existe caminho algum de s a t.
A distância de s a t é o comprimento de um caminho mínimo com origem s e término t. É claro que a distância de s a t é 0 se e somente se s ≡ t. É claro também que a distância de s a t é d se e somente se (1) algum caminho de s a t tem comprimento d e (2) todo caminho de s a t tem comprimento pelo menos d. Se não existe caminho algum de s a t, podemos dizer que a distância de s a t é ∞ (infinita).
O conceito de distância é dirigido
:
a distância de s a t é,
em geral,
diferente da distância de t a s.
Por isso,
dizemos distância de s a t
e não distância entre s e t
.
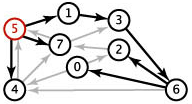
Exemplo A. No grafo da figura, o caminho 0-2-7-3-6 tem comprimento 4. Nenhum caminho de 0 a 6 tem comprimento menor que 4. Logo, o caminho 0-2-7-3-6 é mínimo e a distância do vértice 0 ao vértice 6 é 4. Agora considere a distância na direção contrária. Verifique que a distância de 6 a 0 é 1.
#define UGraph Graph
static int dist[1000];
void distancias( UGraph G, vertex s) {
for (vertex v = 0; v < G->V; ++v) dist[v] = INFINITY;
dist[s] = 0;
dfsR( G, s); }
void dfsR( UGraph G, vertex v) {
for (link a = G->adj[v]; a != NULL; a = a->next)
if (dist[a->w] == INFINITY) {
dist[a->w] = dist[v] + 1;
dfsR( G, a->w); } }
void distancias( Graph G, vertex s, int *dist) {
for (vertex v = 0; v < G->V; ++v) dist[v] = INFINITY;
dist[s] = 0;
for (int d = 0; d < G->V-1; ++d)
for (vertex v = 0; v < G->V; ++v)
if (dist[v] == d)
for (link a = G->adj[v]; a != NULL; a = a->next)
if (dist[a->w] == INFINITY)
dist[a->w] = d + 1; }
Para provar que um dado caminho C é mínimo, precisamos mostrar que todo caminho com a mesma origem e o mesmo término que os de C é pelo menos tão comprido quanto C. Para fazer isso, vamos introduzir o conceito de potencial relaxado.
Um potencial para um grafo G
é uma numeração
dos vértices de G,
ou seja,
um vetor que associa um número
a cada vértice de G.
Em relação a um potencial h[ ],
dizemos que ![]() um arco v-w
está tenso se h[w] − h[v]
> 1
e está relaxado se h[w] − h[v]
≤ 1.
Em outras palavras,
v-w está tenso h[v] + 1 < h[w]
e está relaxado se
um arco v-w
está tenso se h[w] − h[v]
> 1
e está relaxado se h[w] − h[v]
≤ 1.
Em outras palavras,
v-w está tenso h[v] + 1 < h[w]
e está relaxado se
h[v] + 1 ≥ h[w] .
Um potencial é relaxado (ou viável) se deixa todos os arcos de G relaxados.
Qualquer potencial relaxado h[ ]
dá uma cota inferior para as distâncias entre vértices:
se P é um caminho
de um vértice x a um vértice y
então |P| ≥
h[y] − h[x],
sendo |P| o comprimento de P.
(Por exemplo,
![]() se P é o caminho 0-1-2-3
então
|P| =
1 + 1 + 1 ≥
h[3] − h[2] +
h[2] − h[1] +
h[1] − h[0] =
h[3] − h[0].)
Isso leva à seguinte condição suficiente
de minimalidade de um caminho.
se P é o caminho 0-1-2-3
então
|P| =
1 + 1 + 1 ≥
h[3] − h[2] +
h[2] − h[1] +
h[1] − h[0] =
h[3] − h[0].)
Isso leva à seguinte condição suficiente
de minimalidade de um caminho.
Condição suficiente de minimalidade: Para qualquer caminho C de um vértice x a um vértice y, se existe um potencial relaxado h[ ] tal que h[y] − h[x] = |C| então C é mínimo (e portanto a diferença h[y] − h[x] é a distância de x a y).
A recíproca dessa condição é verdadeira se nos restringirmos aos caminhos mínimos que têm uma origem comum: Para qualquer vértice s, o vetor das distâncias a partir de s é um potencial relaxado. Aqui, o vetor das distâncias a partir de s é o vetor d[ ] definido pela seguinte propriedade: para cada vértice v, d[v] é a distância de s a v.
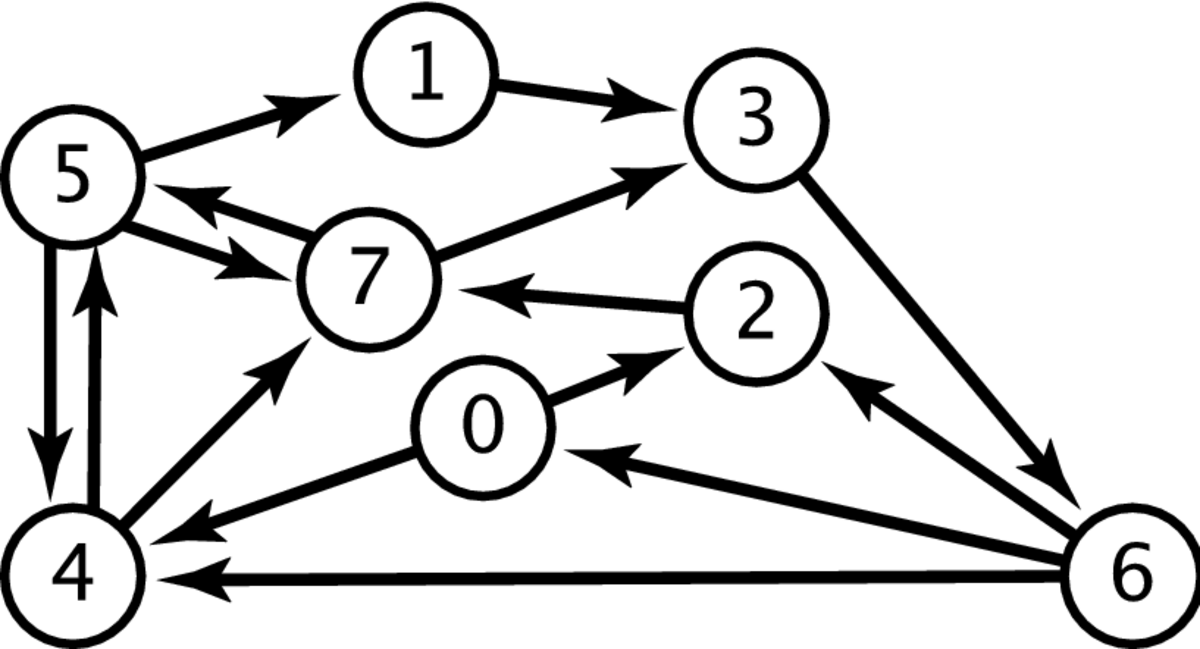
Exemplo B. A tabela abaixo dá as distâncias a partir do vértice 5 no grafo da figura. Verifique pacientemente que d[] é o vetor das distâncias a partir de 5.
v 0 1 2 3 4 5 6 7 d[v] 4 1 4 2 1 0 3 1
Agora verifique que d[] é um potencial relaxado.
Exemplo C. A tabela abaixo especifica um potencial h[] no grafo da figura. Verifique que o potencial é relaxado. O comprimento do caminho 0-2-7-3-6 é exatamente igual à diferença h[6]-h[0]; portanto, esse caminho é mínimo e a distância de 0 a 6 é 4.
v 0 1 2 3 4 5 6 7 h[v] 0 2 1 3 1 1 4 2
O comprimento de qualquer caminho de 0 a 1 é pelo menos h[1]-h[0]. Mas todos os caminhos de 0 a 1 têm comprimento maior que h[1]-h[0]. Qual a distância de 0 a 1?
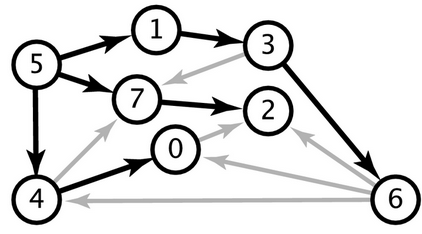
Exemplo D. A tabela abaixo especifica um potencial h[] no grafo da figura. Verifique que o potencial é relaxado. O caminho 0-4-5-1 é mínimo pois seu comprimento é igual a h[1]-h[0]. O caminho 0-2-7-3 é mínimo pois seu comprimento é igual a h[3]-h[0].
v 0 1 2 3 4 5 6 7 h[v] 0 3 1 3 1 2 4 2
A diferença h[3]-h[5] mostra que qualquer caminho de 5 a 3 tem comprimento pelo menos 1. Mas a distância de 5 a 3 é maior que 1.
Para encontrar um caminho mínimo de um vértice s a um vértice t é inevitável calcular todos os caminhos mínimos que começam em s. Isso sugere o seguinte conceito: uma árvore de caminhos curtos de um grafo é uma sub árvore radicada T do grafo tal que
Uma árvore de caminhos curtos também é conhecida
pela abreviatura SPT
de shortest-paths tree
.
Um grafo tem uma SPT
com raiz s
se e somente se
todos os vértices do grafo estão ao alcance de s.
Para grafos desse tipo,
o problema do caminho mínimo
equivale ao seguinte
Problema da SPT: Dado um vértice s de um grafo G, encontrar uma SPT de G que tenha raiz s.
Mesmo nas instâncias do problema que não têm solução, é claro que existe uma SPT com raiz s no subgrafo de G induzido pelo conjunto de vértices que estão ao alcance de s.
De acordo com a condição suficiente de minimalidade de caminhos, para resolver o problema da SPT basta encontrar uma árvore radicada geradora T, com raiz s, tal que o vetor das distâncias em T a partir de s seja um potencial relaxado em G.
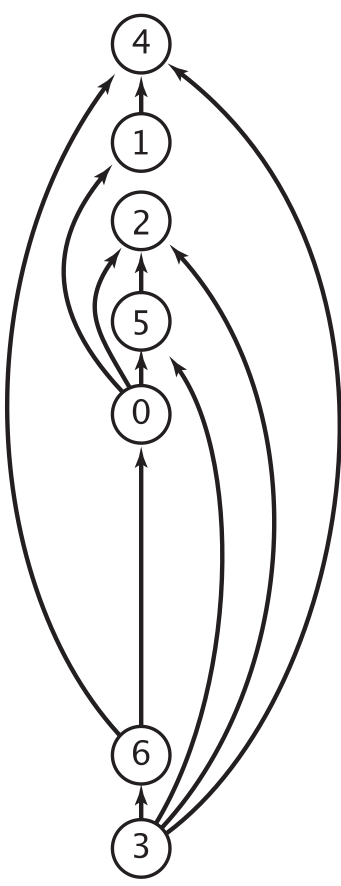
Exemplo E. A figura mostra uma subárvore radicada T de um grafo G. A raiz da árvore é 5. Veja a lista de todos os caminhos em T que têm origem 5:
5-1-3-6-0 5-1 5-1-3-6-2 5-1-3 5-4 5 5-1-3-6 5-7
Na tabela abaixo, h[v] é o vetor das distâncias em T a partir da raiz. Verifique que h[] é um potencial relaxado em G. Portanto, T é uma SPT de G.
v 0 1 2 3 4 5 6 7 h[v] 4 1 4 2 1 0 3 1
0 0-1 0-1-2 0-1-3 0-4 0-4-5 0-4-3-6 0-1-5-7
Examinaremos a seguir um algoritmo para o problema da SPT restrito a dags, ou seja, a grafos acíclicos. A prova da correção do algoritmo depende da condição suficiente para SPT indicada acima.
Como se sabe, um grafo é acíclico se e somente se tem uma numeração topológica e portanto também uma permutação topológica, digamos vv[0..V-1], dos vértices. O algoritmo processará os vértices em ordem topológica: primeiro vv[0], depois vv[1], depois vv[2], etc.
Ao receber um dag G e um vértice s, o algoritmo deve encontrar uma SPT de G com raiz s. É preciso tomar algumas decisões de projeto: vamos supor que (1) o algoritmo recebe uma permutação topológica vv[] e (2) todos os vértices de G estão ao alcance de s (e portanto vv[0] ≡ s).
#define Dag Graph
/* A função recebe um dag G, uma permutação topológica vv[] dos vértices, e um vértice s de G. A função supõe que todos os vértices estão ao alcance de s. A função armazena em pa[] o vetor de pais de uma SPT de G com raiz s. As distâncias a partir de s são armazenadas no vetor dist[]. O espaço para os vetores pa[] e dist[] deve ser alocado pelo usuário. (O código foi inspirado no programa 21.6 de Sedgewick.) */
void DAGspt( Dag G, vertex *vv, vertex s, vertex *pa, int *dist) { const int INFINITY = G->V; for (vertex v = 0; v < G->V; ++v) pa[v] = -1, dist[v] = INFINITY; pa[s] = s, dist[s] = 0; for (int j = 0; j < G->V; ++j) { vertex v = vv[j]; for (link a = G->adj[v]; a != NULL; a = a->next) { vertex w = a->w; if (dist[v] + 1 < dist[w]) { dist[w] = dist[v] + 1; // relaxação de v-w pa[w] = v; } } } }
As seguintes observações podem ajudar a entender o código:
Para verificar que a função está correta, basta observar os seguintes invariantes: no início de cada iteração do processo iterativo principal,
(Segue imediatamente do invariante 2 que dist[x] vale INFINITY se e somente se x não está em T.)
Agora considere a última iteração, que começa com j ≡ G->V e termina imediatamente. Em virtude do invariante 3, dist[] é um potencial relaxado em G. Em virtude dos invariantes 1 e 2, T é uma árvore radicada em G e dist[] é o vetor das distâncias em T a partir de s. Resta apenas provar que T é geradora de G. Para isso, basta mostrar que não existe arco de G com ponta inicial em T e ponta final fora de T. Tome um arco qualquer x-y de G tal que x pertence a T. Como x-y está relaxado, dist[y] ≤ dist[x] + 1. Graças ao invariante 2, dist[x] < INFINITY. Segue daí que dist[y] < INFINITY e portanto y está em T. Isso mostra que T contém todos os vértices que estão ao alcance de s em G, e portanto todos os vértices de G. Concluímos assim que T satisfaz a condições suficientes para SPT (veja a seção Árvore de caminhos curtos). Portanto T é uma SPT de G.
A função DAGspt() supõe que todos os vértices estão ao alcance de s. Mas não é necessário testar essa condição antes de invocar a função: Se a condição não estiver satisfeita, a função produzirá uma SPT no subgrafo induzido pelo conjunto de vértices que estão ao alcance de s.
Desempenho. A função DAGspt() é linear. O consumo de tempo da função é proporcional a V + A no pior caso, sendo V o número de vértices e A o número de arcos do dag G. (Se nos restringirmos aos dags em que A ≥ V, podemos dizer que o consumo de tempo é proporcional a A.) A variante de DAGspt() para dags representados por matriz de adjacências, consome tempo proporcional a V2 no pior caso.
Exemplo F.
Considere o dag definido pelos arcos
0-1 1-2 2-4 0-3 3-4.
Note que todos os vértices estão ao alcance de 0
e adote a permutação topológica
0 1 2 3 4 dos vértices
(faça uma figura).
Aplique a função DAGspt()
para calcular uma SPT com raiz 0.
Veja o estado dos vetores dist[] e pa[]
no início de sucessivas iterações
(com *
representando INFINITY
e -
representando -1):
dist[] pa[]
j vv[j] 0 1 2 3 4 0 1 2 3 4
0 0 0 * * * * 0 - - - -
1 1 0 1 * 1 * 0 0 - 0 -
2 2 0 1 2 1 * 0 0 1 0 -
3 3 0 1 2 1 3 0 0 1 0 2
4 4 0 1 2 1 2 0 0 1 0 3
5 0 1 2 1 2 0 0 1 0 3
Note que dist[4] começa valendo INFINITY, diminui para 3, e depois para 2. Os valores de pa[4] acompanham essa evolução. No fim, dist[] é o vetor das distâncias a partir de 0 e pa[] representa uma SPT.
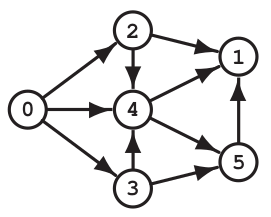
Exemplo G. Considere o dag definidos pelos arcos 0-1 0-2 1-2 0-3 3-4 e adote a permutação topológica 0 1 2 3 4 (faça uma figura). Queremos calcular uma SPT com raiz 1 no subdag induzido pelos vértices que estão ao alcance de 1. Veja o estado dos vetores dist[] e pa[] no início de sucessivas iterações:
dist[] pa[]
j vv[j] 0 1 2 3 4 0 1 2 3 4
0 0 * 0 * * * - 1 - - -
1 1 * 0 * * * - 1 - - -
2 2 * 0 1 * * - 1 1 - -
3 3 * 0 1 * * - 1 1 - -
4 4 * 0 1 * * - 1 1 - -
5 * 0 1 * * - 1 1 - -
No fim da execução de DAGspt(), todos os arcos estão relaxados em relação a dist[]. A árvore radicada definida por pa[] é uma SPT do subgrafo induzido pelos vértices que estão ao alcance de 1. (Note que não existem arcos com ponta inicial na árvore e ponta final fora da árvore.)
enxuto, sem variáveis e operações supérfluas.
distância de s a t? Não deveríamos dizer
distância mínima de s a t?
Resposta:
Nããão! Toda distância é mínima por definição.
Dizer distância mínima
ou
menor distância
é uma redundância do mesmo tipo que subir para cima
e descer para baixo
.