Algoritmos para Grafos | Índice
Como sabemos, um grafo não-dirigido é conexo se cada dois de seus vértices
são ligados por um caminho.
Grafos não-dirigidos aresta-biconexos
satisfazem uma condição mais forte:
cada dois de seus vértices
são ligados por dois caminhos sem arestas em comum.
(A expressão sem arestas em comum
significa que
nenhuma aresta pertence a ambos os caminhos,
ou seja, se um arco v-w pertence a um dos caminhos então
nem v-w nem w-v pertence ao outro.)
Essa definição é natural e intuitiva
mas
difícil de manejar.
Por isso, adotaremos abaixo uma definição equivalente
que é mais cômoda
(ainda que não explique a expressão biconexo
).
Este capítulo trata do problema de decidir se um dado grafo é aresta-biconexo. Em especial, discute um algoritmo eficiente para o problema.
Sumário:
Um grafo não-dirigido é aresta-biconexo (= edge-biconnected = 2-edge-connected) se é conexo e cada uma de suas arestas pertence a algum circuito.
Num grafo não-dirigido, qualquer aresta que não pertence a um circuito é conhecida como ponte (= bridge). Portanto, um grafo não-dirigido é aresta-biconexo se e somente se é conexo e não tem pontes.
Pontes podem ser caracterizadas pela seguinte propriedade:
uma aresta a de um grafo não-dirigido conexo G
é uma ponte
se e somente se
o grafo G−a
é desconexo.
(Nesse sentido, grafos sem pontes são tolerantes a falhas
.)
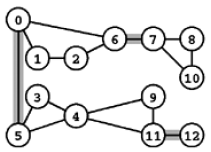
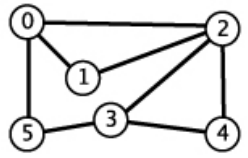
Exemplo A. O grafo da primeira figura é aresta-biconexo. O grafo da segunda figura não é aresta-biconexo pois, embora conexo, tem pontes. As pontes são 0-5, 6-7 e 11-12.
A habilidade de decidir rapidamente se um dado grafo é aresta-biconexo é muito útil. Esse é o problema algorítmico central do presente capítulo:
Problema da aresta-biconexão: Decidir se um grafo não-dirigido é aresta-biconexo.
A parte mais interessante do problema é decidir se o grafo tem pontes. Para fazer isso, basta verificar se a remoção de alguma aresta desconecta o grafo. Mas a aplicação inocente dessa ideia resulta em um algoritmo muito ineficiente.
Robert Tarjan mostrou (1974) como a busca DFS pode ser usada para verificar, eficientemente, a existência de pontes. O algoritmo de Tarjan é o assunto principal deste capítulo. Para entender o algoritmo será necessário percorrer um caminho relativamente longo. Precisamos entender
Faremos isso nas próximas seções.
É fácil perceber que toda floresta DFS de num grafo não-dirigido passa por todas as pontes do grafo. Mas é preciso formular essa propriedade com mais cuidado pois pontes são arestas enquanto florestas DFS são formadas por arcos:
Propriedade DFS das pontes: Depois de uma busca DFS num grafo não-dirigido, um dos dois arcos de cada ponte do grafo é um arco da floresta DFS.
Quais arcos da floresta DFS fazem parte de pontes? (Dizemos que um arco faz parte de uma ponte se for um dos dois arcos que constituem a ponte.) A seguinte definição dá um passo na direção da resposta. Dado um arco u-v da floresta DFS, dizemos que um arco x-y do grafo abraça u-v se as seguintes condições forem satisfeitas:
(Note que x pode ser igual a v e y pode ser igual a u.) É óbvio que qualquer arco que abraça u-v é um arco de retorno e portanto fecha um circuito que passa por u-v. A recíproca é verdadeira, embora não seja tão óbvia. Isso leva à seguinte caracterização:
Lema do abraço: Um arco u-v da floresta DFS faz parte de uma ponte se e somente se nenhum arco do grafo abraça u-v.
A partir deste ponto, será mais cômodo associar a ideia de abraço à ponta final de cada arco da floresta DFS. Assim, diremos que um arco x-y do grafo abraça um vértice v se abraça o arco de floresta que entra em v. (É claro que isso só faz sentido se v não é uma raiz.) Em outras palavras, x-y abraça v se x é descendente de v na floresta, y é ancestral próprio de v na floresta, e x é diferente de v ou y é diferente do pai de v.
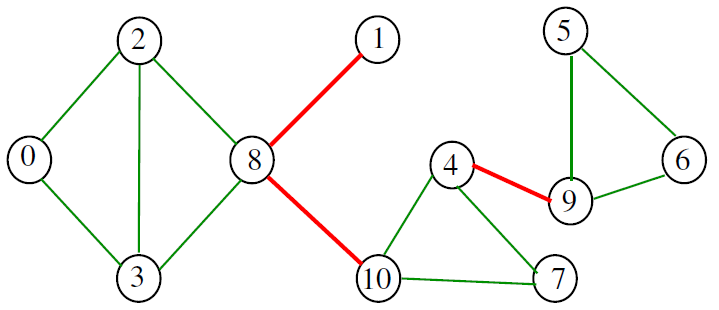
Exemplo B. Considere grafo definido pelas listas de adjacência abaixo. Veja a figura. Observe que as arestas 1-8, 8-10 e 4-9 são as únicas pontes do grafo.
0
|
2
|
3
|
8
/ \
1 10
\
4
/ \
7 9
\
5
\
6
0: 2 3 1: 8 2: 0 3 8 3: 0 2 8 4: 7 9 10 5: 6 9 6: 5 9 7: 4 10 8: 1 2 3 10 9: 4 5 6 10: 4 7 8
Uma busca DFS produz a floresta DFS representada na figura à direita. Você deve imaginar que todos os arcos da figura estão dirigidos de cima para baixo na figura. Cada um dos demais arcos do grafo é de avanço ou de retorno em relação à floresta. (Acrescente esses arcos à figura.) Observe que a floresta contém um dos arcos de cada ponte. O arco 2-3 da floresta não faz parte de uma ponte porque é abraçado pelo arco 8-2. O arco 4-7 da floresta não faz parte de uma ponte porque é abraçado pelo arco 7-10. Já o arco 8-1 da floresta faz parte de uma ponte pois não é abraçado por nenhum arco do grafo. Da mesma forma, os arcos 8-10 e 4-9 da floresta fazem parte de pontes pois não são abraçados por arcos do grafo.
Exemplo C. Considere o grafo não-dirigido definido pelas listas de adjacência abaixo. Veja ao lado uma floresta DFS do grafo. Você deve imaginar que todos os arcos da figura estão dirigidos de cima para baixo e acrescentar à figura os demais arcos do grafo.
0
|
1
|
2
/ \
3 6
/
4
/
5
0: 1 1: 0 2 6 2: 1 3 6 3: 2 4 5 4: 3 5 5: 3 4 6: 1 2
Como o grafo é não-dirigido, todos os arcos que não pertencem à floresta DFS ligam um ancestral a um descendente. O arco 5-3 abraça os vértices 5 e 4. O arco 6-1 abraça os vértices 6 e 2. Os demais arcos não abraçam vértice algum. Portanto, 2-3 e 0-1 são as únicas pontes.
Para que o lema do abraço possa ser usado de maneira eficiente, é preciso introduzir um conceito auxiliar. Digamos que pre[] é a numeração em pré-ordem produzida pela busca DFS no grafo. Então o número de pré-ordem mínimo (= lowest preorder number) ao alcance de um vértice v é o número
lo[v] = minx-y pre[y],
sendo o mínimo tomado sobre todos os arcos x-y
que abraçam v.
(Muitos livros escrevem low[]
no lugar do meu lo[]
.)
De acordo com a definição, lo[v] é infinito
se nenhum arco abraça v.
Mas é mais conveniente dizer que
lo[v] = pre[v]
nesse caso.
Essa definição faz sentido pois se algum arco abraça v
então lo[v] < pre[v].
Graças a essa definição,
podemos dizer que lo[v] ≤ pre[v]
para todo vértice v sem exceção.
Combinado com o lema do abraço, o vetor lo[] permite dizer que um arco u-v da floresta DFS é uma ponte se e somente se
lo[v] ≡ pre[v].
Exemplo D. Considere o grafo não-dirigido com vértices a b c d e f g h i j definido pelas listas de adjacência abaixo. Veja à direita a figura de uma floresta DFS do grafo. Você deve imaginar que todos os arcos estão dirigidos de cima para baixo na figura e acrescentar à figura as demais arestas do grafo. À esquerda de cada vértice v da figura aparece o número pre[v] e à direita o número lo[v].
0a0
|
1b0
|
2c0
/ \
3d1 7h0
/ \
4e4 8i2
/ \
5f4 9j9
/
6g4
a: b h b: c d a c: d h i b d: e b c e: f g d f: g e g: e f h: i a c i: j c h j: i
Veja a seguir os vetores pre[] e lo[]:
v a b c d e f g h i j
pre[v] 0 1 2 3 4 5 6 7 8 9
lo[v] 0 0 0 1 4 4 4 0 2 9
O arco d-e da floresta faz parte de uma ponte porque lo[e] ≡ 4 ≡ pre[e]. O arco i-j da floresta faz parte de uma ponte porque lo[j] ≡ 9 ≡ pre[j]. As arestas d-e e i-j são as únicas pontes do grafo.
Cálculo eficiente de lo[ ]. Poderíamos calcular lo[v] diretamente a partir da definição, mas isso seria muito ineficiente. Um cálculo eficiente usa a seguinte fórmula recursiva, que exprime o valor que lo[] tem em v em função dos valores que lo[] tem nos filhos de v. Para cada vértice v, lo[v] é o menor dos seguintes números:
Essa fórmula vale porque qualquer arco x-y
que abraça um filho w de v
também abraça v,
a menos que y seja igual a v.
Para aplicar a fórmula,
basta examinar os vértices de baixo para cima
,
começando com as folhas da floresta DFS e subindo em direção às raízes.
Em outras palavras,
basta examinar os vértices em pré-ordem inversa,
pois nessa ordem todo vértice vem depois de seus filhos
(já que a pré-ordem é uma permutação topológica dos vértices da floresta DFS).
Na verdade,
podemos igualmente bem examinar os vértices em
pós-ordem,
pois também nessa ordem todo vértice aparece depois de seus filhos.
A função a seguir faz exatamente isso:
#define UGraph Graph static int pre[1000]; static vertex pa[1000]; static int lo[1000]; #define min( A, B) (A) < (B) ? (A) : (B);
/* Esta função faz uma busca DFS no grafo não-dirigido G e calcula o lowest preorder number lo[] de cada vértice de G. Também calcula os vetores pre[], post[] e pa[] correspondentes à busca DFS. */
void UGRAPHlo( UGraph G) { GRAPHdfs( G); // calcula pre[], post[] e pa[] vertex vv[1000]; for (vertex v = 0; v < G->V; ++v) vv[post[v]] = v; // vv[0..V-1] é permutação em pós-ordem for (int i = 0; i < G->V; ++i) { vertex v = vv[i]; lo[v] = pre[v]; for (link a = G->adj[v]; a != NULL; a = a->next) { vertex w = a->w; if (pre[w] < pre[v]) { // A if (w != pa[v]) lo[v] = min( lo[v], pre[w]); } else { // B if (pa[w] == v) lo[v] = min( lo[v], lo[w]); } } } }
No ponto A, o vértice w é ancestral próprio de v (veja a classificação DFS de arcos em grafos não-dirigidos no capítulo DFS e pós-ordem). Será também ancestral próprio do pai de v se tivermos w ≠ pa[v].
No ponto B,
o vértice w é descendente próprio de v.
Será filho de v se tivermos
pa[w] ≡ v.
Como w é descendente de v,
o valor de lo[w] já está definido
podendo ser usado na comparação
com lo[v].
(A cláusula if (pa[w] == v)
é redundante,
pois se lo[w] < lo[v]
então lo[w] ≡ pre[y]
para algum arco x-y que abraça w
e nesse caso x-y também abraça v.)
É um ótimo exercício escrever uma versão recursiva da função UGRAPHlo() e fazer o rastreamento da aplicação da função a um exemplo simples.
Exemplo E. Considere novamente o grafo não-dirigido do exemplo B. Para que o exemplo fique mais legível, usaremos os seguintes nomes alfabéticos alternativos para os vértices:
0 1 2 3 4 5 6 7 8 9 10 a b c d e f g h i j k
0a0
|
1c0
|
2d0
|
3i1
/ \
4b4 5k5
\
6e5
/ \
7h5 8j8
\
9f8
\
10g8
Veja à direita a figura de uma floresta DFS do grafo. Você deve imaginar que todos os arcos estão dirigidos de cima para baixo na figura. À esquerda de cada vértice v aparece o número pre[v] e à direita o número lo[v]. Veja os vetores pre[], post[] e lo[]:
v b h g f j e k i d c a
pre[v] 4 7 10 9 8 6 5 3 2 1 0
post[v] 0 1 2 3 4 5 6 7 8 9 10
lo[v] 4 5 8 8 8 5 5 1 0 0 0
Como os vértices estão listados em pós-ordem na primeira linha da tabela, é fácil aplicar a fórmula recursiva e assim verificar que a linha lo[] da tabela está correta. O arco e-j da floresta faz parte de uma ponte porque lo[j] ≡ 8 ≡ pre[j]. O arco i-k da floresta faz parte de uma ponte porque lo[k] ≡ 5 ≡ pre[k]. O arco i-b faz parte de uma ponte pois lo[b] ≡ 4 ≡ pre[b]. As arestas e-j, i-k e i-b são as únicas pontes do grafo.
grafo-circuito0-1-2-3-4-5-6-7-8-9-0. Faça uma busca DFS a partir do vértice 0. Calcule lo[] diretamente a partir da definição.
trevo de 3 folhasdefinido pelos arcos 0-1 1-0 1-2 2-1 1-3 3-2. Calcule a numeração lo[] diretamente a partir da definição.
void lowestPre( UGraph G) {
GRAPHdfs( G);
for (vertex v = 0; v < G->V; ++v) lo[v] = pre[v];
for (vertex v = 1; v < G->V; ++v)
for (link a = G->adj[v]; a != NULL; a = a->next) {
vertex w = a->w;
if (pre[w] < pre[v] && w != pa[v]) {
vertex x = v;
while (lo[x] > pre[w]) {
lo[x] = pre[w];
x = pa[x]; } } } }
de cima para baixona floresta DFS enquanto lo[] é calculado
de baixo para cima.) [Solução]
a: b b: c a f c: d b d: e c e: f d f: b e
Finalmente, podemos apresentar o algoritmo de Tarjan
(não confunda com Tarzan
![]() )
para o problema da aresta-biconexão.
Depois de usar a função UGRAPHlo()
para calcular os vetores pre[] e lo[],
o algoritmo verifica a existência de pontes
aplicando o teste lo[v] ≡ pre[v]
a todo vértice v.
)
para o problema da aresta-biconexão.
Depois de usar a função UGRAPHlo()
para calcular os vetores pre[] e lo[],
o algoritmo verifica a existência de pontes
aplicando o teste lo[v] ≡ pre[v]
a todo vértice v.
#define UGraph Graph static int pre[1000], post[1000]; static vertex pa[1000]; static int lo[1000];
/* A função UGRAPHebicon3() decide se o grafo não-dirigido G é aresta-biconexo. (A função implementa o algoritmo de Tarjan.) */
bool UGRAPHebicon3( UGraph G) { UGRAPHlo( G); // calcula pre[], pa[] e lo[] for (vertex v = 0; v < G->V; ++v) { if (lo[v] == pre[v] && pa[v] != v) return false; // pa[v]-v é ponte } int roots = 0; for (vertex v = 0; v < G->V; ++v) { if (pa[v] == v) ++roots; if (roots > 1) return false; // G é desconexo } return true; }
Desempenho. Como acontece com muitos algoritmos baseados na busca em profundidade, a função UGRAPHebicon3() consome apenas V + E unidades de tempo quando aplicada a um grafo com V vértices e E arestas. Podemos dizer, portanto, que a função é linear. A variante de UGRAPHebicon3() para matrizes de adjacência consome tempo proporcional a V2; esse desempenho é linear no caso de grafos densos.
a: b b: e c a c: j e d b d: e c e: h g f d c b f: e g g: f e h: j i e i: h j: c h
Ao invocar UGRAPHlo(), a função UGRAPHebicon3() examina o grafo todo duas vezes. Embora isso resulte em um algoritmo linear, é preferível obter o mesmo efeito examinando o grafo uma só vez. Para isso, é preciso detectar a presença de pontes durante a execução de uma busca em profundidade e interromper a busca assim que uma ponte for encontrada. (Para melhor entender como isso pode ser feito, é uma boa ideia escrever antes uma versão recursiva de UGRAPHlo().)
#define UGraph Graph static int cnt, pre[1000]; static vertex pa[1000]; static int lo[1000]; #define min( A, B) (A) < (B) ? (A) : (B)
/* A função UGRAPHebicon() decide se o grafo não-dirigido G é aresta-biconexo. (Esta é uma implementação on-the-fly do algoritmo de Tarjan. Código inspirado no programa 18.7 de Sedgewick.) */
bool UGRAPHebicon( UGraph G) { for (vertex v = 0; v < G->V; ++v) pre[v] = -1; cnt = 0; pa[0] = 0; if (dfsRbridge( G, 0)) // G tem ponte return false; for (vertex v = 1; v < G->V; ++v) if (pre[v] == -1) // G é desconexo return false; return true; }
/* A função dfsRbridge() calcula lo[v]. Devolve true se houver uma ponte na subfloresta DFS que tem raiz v. Senão, devolve false. */
static bool dfsRbridge( UGraph G, vertex v) { pre[v] = cnt++; lo[v] = pre[v]; for (link a = G->adj[v]; a != NULL; a = a->next) { vertex w = a->w; if (pre[w] != -1) { // v-w é de retorno ou avanço if (w != pa[v]) // A lo[v] = min( lo[v], pre[w]); // B } else { pa[w] = v; if (dfsRbridge( G, w)) // calcula lo[w] return true; // C if (lo[w] == pre[w]) // v-w é ponte return true; // D lo[v] = min( lo[v], lo[w]); // E } } return false; // F }
Assim como UGRAPHlo(),
a função dfsRbridge()
calcula o vetor lo[] de baixo para cima
,
ou seja,
começando pelas folhas da floresta DFS
(linhas A e
B)
e subindo em direção às raízes da floresta.
O valor de lo[w]
calculado na linha
calcula lo[w]
é passado para cima
na
linha E,
onde pode contribuir para o valor de lo[v].
A linha D
interrompe a execução de dfsRbridge()
quando a primeira ponte é encontrada.
Desempenho. Como acontece com muitos algoritmos baseados em busca em profundidade, esta versão on-the-fly da função UGRAPHebicon() consome apenas V + E unidades de tempo quando aplicada a um grafo não-dirigido com V vértices e E arestas. Podemos dizer, portanto, que a função é linear. A variante de UGRAPHebicon() para matrizes de adjacência consome tempo proporcional a V2; esse desempenho é linear no caso de grafos densos.
Exemplo F. Considere o grafo não-dirigido da figura. Veja a seguir o rastreamento da função UGRAPHebicon(). (Pode ser útil fazer antes o rastreamento da versão recursiva de UGRAPHlo().)
0 dfsRbridge(G,0)
0-2 dfsRbridge(G,2)
2-0
2-3 dfsRbridge(G,3)
3-0 (lo[3]=0) (linha B)
3-2
3-8 dfsRbridge(G,8)
8-1 dfsRbridge(G,1)
1-8
1 (return false) (linha F)
8 (return true) (linha D, 8-1 é ponte)
3 (return true) (linha C)
2 (return true) (linha C)
0 (return true) (linha C)
0 | 2 | 3 | 8 / 1
A encarnação dfsRbridge(G,1) de dfsRbridge() devolve false na linha F da função e morre. Depois disso, a encarnação dfsRbridge(G,8) descobre a ponte 8-1 na linha D, devolve true, e morre. Em seguida, a encarnação dfsRbridge(G,3) devolve true na linha C e morre. E assim por diante. Veja o estado final dos vetores pre[] e lo[]:
v 0 2 3 8 1 10 4 7 9 5 6
pre[v] 0 1 2 3 4 - - - - - -
lo[v] 0 1 0 3 4 - - - - - -
a | b | c | d | e | f
Exemplo G.
Aplique a função UGRAPHebicon()
ao grafo-circuito
definido pelas listas de adjacência a seguir.
(A figura mostra a floresta DFS construída por UGRAPHebicon().)
a: b f b: c a c: d b d: e c e: f d f: a e
Veja o rastreamento da execução da função:
a dfsRbridge(G,a)
a-b dfsRbridge(G,b)
b-c dfsRbridge(G,c)
c-d dfsRbridge(G,d)
d-e dfsRbridge(G,e)
e-f dfsRbridge(G,f)
f-a (lo[f]=0) (linha B)
f-e
f (return false, lo[e]=0) (linhas F e E)
e-d
e (return false, lo[d]=0) (linhas F e E)
d-c
d (return false, lo[c]=0) (linhas F e E)
c-b
c (return false, lo[b]=0) (linhas F e E)
b-a
b (return false, lo[a]=0) (linhas F e E)
a-f (lo[a]=0) (linha B)
a (return false) (linha F)
A função UGRAPHebicon() devolve true. Veja o estado final dos vetores pre[] e lo[]:
v a b c d e f
pre[v] 0 1 2 3 4 5
lo[v] 0 0 0 0 0 0
grafo-circuito0-1-2-3-4-5-6-7-8-9-0. Explique o que acontece em cada linha do código da função.
enxuta, sem comandos nem variáveis supérfluos. Aplique a função ao grafo do exemplo B. Importante: faça um rastreamento da execução da função.
grafo biconexono lugar do trava-língua
grafo aresta-biconexo?
Resposta:
Infelizmente,
a tradição já reservou o adjetivo biconexo
para um
conceito diferente.
Resposta: Não. A restrição a grafos conexos não simplifica nada.